Welcome to IgMin Research – an Open Access journal uniting Biology, Medicine, and Engineering. We’re dedicated to advancing global knowledge and fostering collaboration across scientific fields.
At IgMin Research, we bridge the frontiers of Biology, Medicine, and Engineering to foster interdisciplinary innovation. Our expanded scope now embraces a wide spectrum of scientific disciplines, empowering global researchers to explore, contribute, and collaborate through open access.
Welcome to IgMin, a leading platform dedicated to enhancing knowledge dissemination and professional growth across multiple fields of science, technology, and the humanities. We believe in the power of open access, collaboration, and innovation. Our goal is to provide individuals and organizations with the tools they need to succeed in the global knowledge economy.
IgMin Publications Inc., Suite 102, West Hartford, CT - 06110, USA
Based on the recent study of the Third Thumb at the University of Cambridge, one profound question is arising: Do human beings and the human body need a Third Thumb? This article introduces briefly motor augmentation and human augmentation emerging in decades compared to human enhancement, then focuses on three concerns deriving from the methodology of engineering system design including the relationship of system and part, main function and auxiliary function, and engineering system evolution and human evolution, so as to discuss the coordination between the human body and artificial parts generated by wearable interactive technology employed in motor augmentation.
In the 21st century, discussions on human enhancement abound with both excitement and apprehension, alongside promising prospects for humanity’s future amidst advancing AI and other technologies [11Grinschgl S, Tawakol Z, Neubauer AC. Human enhancement and personality: A new approach towards investigating their relationship. Heliyon. 2022;8(5):e09359. Available from: https://pubmed.ncbi.nlm.nih.gov/35574200/]. Various enhancement methods aim to create “better humans” surpassing natural abilities. Human 2.0 refers to the integration of cognitive and physical improvements into the human body [22Pirmagomedov R, Koucheryavy Y. IoT technologies for Augmented Human: A survey. Internet of Things. 2021;14:100120.. Available from: https://doi.org/10.1016/j.iot.2019.100120]. Concurrently, transhuman, characterized by the transformation of humanity through technological progress [33Battle-Fisher M. Transhuman, posthuman and complex humanness in the 21st Ethics Med Public Health. 2020; 13:100400. Available from: https://doi.org/10.1016/j.jemep.2019.07.001], introduces distinct dimensions of negativity/positivity and so cietal/individual orientation. Endowed with artificially enhanced or extended capabilities, Human 2.0 not only promises significant enhancements in quality of life and potential competitive advantages but also raises profound ethical questions in contemporary applied ethics [44Rueda J. The ethics of doing human enhancement ethics. Futures. 2023;153:103236. Available from: https://doi.org/10.1016/j.futures.2023.103236].
Key technologies of Human 2.0, such as motor augmentation, human enhancement, and human augmentation [55De Boeck M, Vaes K. Human augmentation and its new design perspectives. Int J Des Creat Innov. 2024;12(1):61-80. Available from: https://www.tandfonline.com/doi/full/10.1080/21650349.2023.2288125], involve complex interdisciplinary engineering system research. This paper, through the lens of Trends of Engineering System Evolution (TESE) [66Fey V, Rivin E. Innovation on Demand: New Product Development Using TRIZ. Cambridge: Cambridge University Press; 2005. Available from: https://www.cambridge.org/core/books/innovation-on-demand/4349A99BF31EF25B3ABED4D424A4B2BC], addresses three fundamental aspects derived from engineering system design methodology: the relationship between system and component, primary function and auxiliary function, and the evolution of engineering systems vis-à-vis human evolution. It explores the integration of wearable interactive technology in motor augmentation, exemplified by the recent University of Cambridge project, the Third Thumb, posing a profound question to individuals and society alike: Do human beings and the human body necessitate a Third Thumb?
The Third Thumb from the University of Cambridge
Issued by the University of Cambridge [77Brierley C. Getting to grips with an extra thumb, It's easier than you might think. 2024. Available from: https://www.cam.ac.uk/stories/third-thumb], The Third Thumb, an extra robotic thumb worn on the opposite side of the palm to the biological thumb aims at increasing the user’s range of movement, enhancing their grasping capability and expanding the carrying capacity of the hand by adding two freedoms motion-flexion/extension and adduction/abduction.
The Third Thumb is an example of motor augmentation which allows the users to perform tasks that might be otherwise challenging or impossible to complete with one hand or to perform complex multi-handed tasks [88McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/]. Statistic results from the experiment that the Third Thumb enables 98% of 596 participants to successfully wear, operate, and perform one of two tasks which involved moving pegs or various foam objects [77Brierley C. Getting to grips with an extra thumb, It's easier than you might think. 2024. Available from: https://www.cam.ac.uk/stories/third-thumb]. The training enabled them to successfully improve their motor control, dexterity, and hand-thumb coordination [77Brierley C. Getting to grips with an extra thumb, It's easier than you might think. 2024. Available from: https://www.cam.ac.uk/stories/third-thumb,88McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/].
There are the following characteristics of the Third Thumb [99Kieliba P, Clode D, Maimon-Mor RO, Makin TR. Robotic hand augmentation drives changes in neural body representation. Science Robotics. 2021;6(54).. Available from: https://www.science.org/doi/10.1126/scirobotics.abd7935]
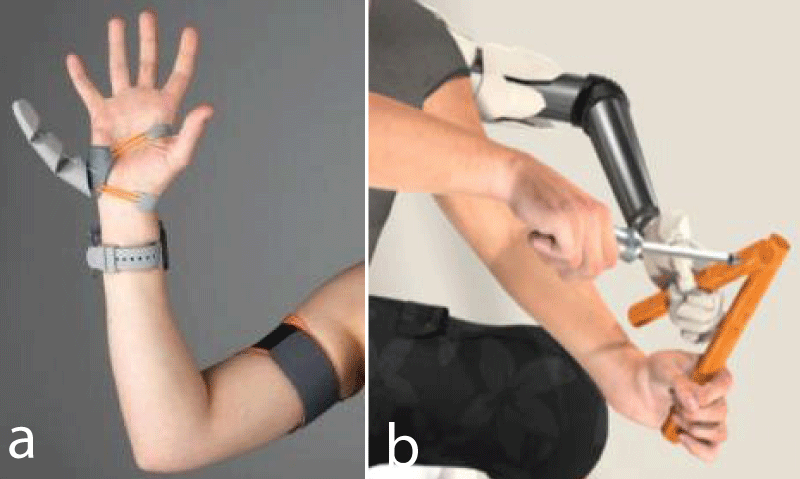
Inclusive wearability, a 3D-printed hand augmentation device with two motors mounted on a wrist strap and powered by an external battery pack worn on the upper arm (Figure 1a). Easily usability, two freedoms motion from the Thumb, which is controlled by a pressure sensor placed under each big toe of the foot with one controlled pressure from the right toe pulling the Thumb across the hand and the other pressure exerted with the left toe pulling the Thumb up toward the fingers.
Simple control, pressure sensors attached to users’ feet which are wirelessly connected to the Thumb, the Thumb’s movement is proportional to the pressure applied, and releasing pressure moves it back to its original position.
The Third Thumb can be used not only to boost the abilities of able-bodied users but also to aid people with diminished manual dexterity. Just like a third arm controlled by foot movements for three-tool surgery (Figure 1b) and the exoskeletons assisting humans to lift heavier items for manual handling of goods.
88McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/]; b: Extra hand for assembly tasks[1010Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/]. DoF augmentation concepts for motor augmentation." /> Figure 1: a: The third Thumb of Cambridge University [88McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/]; b: Extra hand for assembly tasks[1010Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/]. DoF augmentation concepts for motor augmentation.
However, there are two challenges for the Third Thumb
Co-existence: The Third Thumb, as an additional digit, should effectively harmonize and coexist with the original five fingers.
Co-function: The third Thumb, as an additional digit, should efficiently collaborate with the original five fingers to enhance the hand’s capabilities.
Three concerns from the methodology of engineering system design
The first concern deriving from the methodology of engineering system design is the relationship between system and part. Obviously, the ability to successfully coordinate between the Thumb (additional part) and the biological hand (original system) across diverse task demands is crucial for the successful adoption of augmentation devices. The additional parts should increase the value of the whole system rooted in the improving functions.
The second concern deriving from the methodology of engineering system design is the relationship between the main function and auxiliary function. Importantly, a further challenge for augmentation is to ensure that the device usage will not impact users’ basic and primary ability to control their biological body, especially while the augmentative device is not being used or even worn.
The third concern deriving from the methodology of engineering system design is the relationship between the evolution of engineering systems and human evolution. The evolution and development of any engineering system must not contradict the evolution of humanity.
Motor augmentation, Human augmentation, and Human enhancement
In the paradigm of motor augmentation, the third thumb is a supernumerary effector (SE) in the form of a wearable limb with artificial supernumerary DoFs (sDoFs) compared to natural DoFs of the hand. The goal of human motor augmentation is to extend a person’s movement abilities. When this augmentation increases the number of movement degrees-of-freedom (DoFs+sDoFs), it can enable a person to perform tasks beyond their biological constraints [1010Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/].
The third concern deriving from the methodology of engineering system design starts from the evolution of the engineering system. Following the development path of engineering systems from actuation augmentation (DoF and material) to transmission augmentation, then power augmentation, and finally control augmentation, motor augmentation can be classified based on the specific aspects of motor action that are enhanced including: (1) Power augmentation which increases the user’s forces or speed; (2) Workspace augmentation (transmission augmentation) which extends the spatial reach of natural limbs with tools or through teleoperation or outer space manipulation; (3) Control augmentation which addresses the limitations of the motor system by processing the user’s command signal. While being one type of (4) actuation augmentation, DoF augmentation ideally provides independent and coordinated control of sDoFs with respect to one’s own natural DoFs. DoF augmentation could potentially reshape human-environment interaction [1010Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/].
Human augmentation is an interdisciplinary field that addresses methods, technologies, and their applications for enhancing sensing, action, and/or cognitive abilities of a human, and therefore enhancing human productivity or capability. This is achieved through sensing and actuation technologies, fusion and fission of information, and artificial intelligence (AI) methods [1111Prattichizzo D, Pozzi M, Baldi TL, Malvezzi M, Hussain I, Rossi S, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives. Prog Biomed Eng. 2021;3:042005. Available from: https://iopscience.iop.org/article/10.1088/2516-1091/ac2294,1212Alicea B. An Integrative Introduction to Human Augmentation Science. 2018. Available from: https://arxiv.org/abs/1804.10521]. There are examples that focus on the physical, cognitive, and perceptual augmentation of humans through digital technologies can be found in The Augmented Humans (AHs) International Conference 2024.
Human augmentation can be divided into three main categories of augmentation [1111Prattichizzo D, Pozzi M, Baldi TL, Malvezzi M, Hussain I, Rossi S, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives. Prog Biomed Eng. 2021;3:042005. Available from: https://iopscience.iop.org/article/10.1088/2516-1091/ac2294]: (1) Sense augmentation (high level of transmission augmentation) is achieved by interpreting available multisensory information and presenting content to the human through selected human senses. Sub-classes include augmented vision, hearing, haptic sensation, smell, and taste. (2) Action augmentation (high level of actuation augmentation) is achieved by sensing human actions and mapping them to actions in local, remote, or virtual environments. Sub-classes include motor augmentation, amplified force, and movement, speech input, gaze-based controls, teleoperation, remote presence, and others. (3) Cognition augmentation (high level of control augmentation) is achieved by detecting the human cognitive state, using analytical tools to make a correct interpretation of it, and the decision to match the current and predictive needs of the user.
Human enhancement refers to the deliberate use of technologies and science-based interventions in the body, brain, or genes to improve the traits, abilities, or well-being of healthy and normal individuals [1313Rueda J, Pugh J, Savulescu J. The morally disruptive future of reprogenetic enhancement technologies. Trends Biotechnol. 2023;41(5):589-592. Available from: https://pubmed.ncbi.nlm.nih.gov/36396521/]. So, Human enhancement is a broader field covering several disciplines from electrical or mechanical to genetic engineering [1414Raisamo R, Rakkolainen I, Majaranta P, Salminen K, Rantala J, Farooq A, Human Moore. Enhancing me: the hope and the hype of human enhancement. Chichester, UK: Wiley/Dana Centre; 2008.]. Three main classifications of human enhancement currently exist: reproductive (creature-transmission), physical (creature-action), and mental (creature-control). Many different forms of human-enhancing technologies are either on the way or are currently being tested and trialed which include human genetic engineering (gene therapy), neurotechnology (neural implants and brain-computer interfaces), cyberware, strategies for engineered negligible senescence, nanomedicine, 3D bioprinting, and the coming mind uploading, exocortex, and endogenous artificial nutrition, etc.
Undoubtedly, there are two common traits for motor augmentation, human augmentation and Human enhancement. Firstly, they all follow the general evolution principles from the actuation part to the transmission part to the power part, and finally to the control part. Usually, the actuation part is combined with the power part or power part involved in the actuation part. Secondly, they are all merging with technological innovation that will advance post-humanism. Hence, there are always ethical issues related to the availability and use of such technologies, social concerns for equality, misuse, unfair competitive advantage, privacy, social manipulation, autonomy and side effects, accessibility, safety, unpredictable future, etc.
Human-machine harmony in engineering system evolution and human evolution
In the extensive methodology of engineering system design, the Trends of Engineering System Evolution (TESE) occupy a very special place: they provide an unprecedented view into the usually obscure window of the technological future.
Body enhancement emphasizes systematic function enhancement but one piece of function improvement. At the time being, motor augmentation focuses on specific function advancements, like the third thumb having more grasping space and more force-supporting. In daily life, the systematic coordination control between the five biological fingers and one 3D-printed finger should be more important for one hand and for humans. Here, one more question coming from the system structure or configuration, is 6-fingers of one hand better than 5-fingers one? Or in the other way, for a normal all-ability human, do we need a third thumb?
The third concern deriving from the methodology of engineering system design would land on the relationship between engineering system evolution and human evolution. Compared to the engineering system evolution, human is the perfect result of a huge time-scale evolution.
The evolution of one engineering system usually starts from the actuation part connecting to the transmission part, then to the power part, and finally to the control part. Anyway for human beings, the entirely end customers, the engineering system should be evolved from more complicated to be trimmed into a smart one for more agreeable and accessibility.
Meanwhile, the human figure evolves over millions of years which is suitable for the 3-dimentional real physical world. One body and one head with two arms, two legs, two hands, and two feet, such a configuration with a dual system is optimal for the body balance and functions’ reliability.The future will see that humans can be loaded into transformers for motor augmentation, human augmentation, and human enhancement. The harmonious control is the pivot of the multi-function improvement of such transformers. So, do we need a third thumb? Maybe yes! Does our body need it? Maybe no!
Regardless of ongoing research into the transition from human to transhuman or posthuman, the question of who we believe ourselves to be is swiftly being overshadowed by who we are evolving into, empowered by advanced technologies. Typically, our identity comprises three layers: our social identity in terms of interpersonal relationships, our external individual characteristics, and our internal personalities. The evolution of who we are becoming as Human2.0 manifests in sophisticated ways across physiology, psychology, and philosophy. Nonetheless, technologies and engineering should ultimately enhance human existence, ensuring a more harmonious and manageable life rather than merely a better one.
This research was supported by the following institution: Beijing Precision Electromechanical Control Equipment Research Institute, project CALT2023-18.
Grinschgl S, Tawakol Z, Neubauer AC. Human enhancement and personality: A new approach towards investigating their relationship. Heliyon. 2022;8(5):e09359. Available from: https://pubmed.ncbi.nlm.nih.gov/35574200/
Pirmagomedov R, Koucheryavy Y. IoT technologies for Augmented Human: A survey. Internet of Things. 2021;14:100120.. Available from: https://doi.org/10.1016/j.iot.2019.100120
Battle-Fisher M. Transhuman, posthuman and complex humanness in the 21st Ethics Med Public Health. 2020; 13:100400. Available from: https://doi.org/10.1016/j.jemep.2019.07.001
Rueda J. The ethics of doing human enhancement ethics. Futures. 2023;153:103236. Available from: https://doi.org/10.1016/j.futures.2023.103236
De Boeck M, Vaes K. Human augmentation and its new design perspectives. Int J Des Creat Innov. 2024;12(1):61-80. Available from: https://www.tandfonline.com/doi/full/10.1080/21650349.2023.2288125
Fey V, Rivin E. Innovation on Demand: New Product Development Using TRIZ. Cambridge: Cambridge University Press; 2005. Available from: https://www.cambridge.org/core/books/innovation-on-demand/4349A99BF31EF25B3ABED4D424A4B2BC
Brierley C. Getting to grips with an extra thumb, It's easier than you might think. 2024. Available from: https://www.cam.ac.uk/stories/third-thumb
McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/
Kieliba P, Clode D, Maimon-Mor RO, Makin TR. Robotic hand augmentation drives changes in neural body representation. Science Robotics. 2021;6(54).. Available from: https://www.science.org/doi/10.1126/scirobotics.abd7935
Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/
Prattichizzo D, Pozzi M, Baldi TL, Malvezzi M, Hussain I, Rossi S, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives. Prog Biomed Eng. 2021;3:042005. Available from: https://iopscience.iop.org/article/10.1088/2516-1091/ac2294
Alicea B. An Integrative Introduction to Human Augmentation Science. 2018. Available from: https://arxiv.org/abs/1804.10521
Rueda J, Pugh J, Savulescu J. The morally disruptive future of reprogenetic enhancement technologies. Trends Biotechnol. 2023;41(5):589-592. Available from: https://pubmed.ncbi.nlm.nih.gov/36396521/
Raisamo R, Rakkolainen I, Majaranta P, Salminen K, Rantala J, Farooq A, Human Moore. Enhancing me: the hope and the hype of human enhancement. Chichester, UK: Wiley/Dana Centre; 2008.
YU L, LV B, LI X, Wang Y, Oyename IF. From Motor Augmentation to Body Enhancement, the Harmony between Human Body and Artificial Parts. IgMin Res. Jul 05, 2024; 2(7): 524-527. IgMin ID: igmin212; DOI:10.61927/igmin212; Available at: igmin.link/p212
1School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China
2Beijing Precision Electromechanical Control Equipment Research Institute, Beijing 100071, China
Address Correspondence: Liming YU, School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China, Email: [email protected]
How to cite this article: YU L, LV B, LI X, Wang Y, Oyename IF. From Motor Augmentation to Body Enhancement, the Harmony between Human Body and Artificial Parts. IgMin Res. Jul 05, 2024; 2(7): 524-527. IgMin ID: igmin212; DOI:10.61927/igmin212; Available at: igmin.link/p212
Figure 1: a: The third Thumb of Cambridge University [8]; b...
Grinschgl S, Tawakol Z, Neubauer AC. Human enhancement and personality: A new approach towards investigating their relationship. Heliyon. 2022;8(5):e09359. Available from: https://pubmed.ncbi.nlm.nih.gov/35574200/
Pirmagomedov R, Koucheryavy Y. IoT technologies for Augmented Human: A survey. Internet of Things. 2021;14:100120.. Available from: https://doi.org/10.1016/j.iot.2019.100120
Battle-Fisher M. Transhuman, posthuman and complex humanness in the 21st Ethics Med Public Health. 2020; 13:100400. Available from: https://doi.org/10.1016/j.jemep.2019.07.001
Rueda J. The ethics of doing human enhancement ethics. Futures. 2023;153:103236. Available from: https://doi.org/10.1016/j.futures.2023.103236
De Boeck M, Vaes K. Human augmentation and its new design perspectives. Int J Des Creat Innov. 2024;12(1):61-80. Available from: https://www.tandfonline.com/doi/full/10.1080/21650349.2023.2288125
Fey V, Rivin E. Innovation on Demand: New Product Development Using TRIZ. Cambridge: Cambridge University Press; 2005. Available from: https://www.cambridge.org/core/books/innovation-on-demand/4349A99BF31EF25B3ABED4D424A4B2BC
Brierley C. Getting to grips with an extra thumb, It's easier than you might think. 2024. Available from: https://www.cam.ac.uk/stories/third-thumb
McFarland A. Robotic ‘Third Thumb’ Changes How Hand is Represented in Brain. Available from: https://www.unite.ai/robotic-third-thumb-changes-how-hand-is-represented-in-brain/
Kieliba P, Clode D, Maimon-Mor RO, Makin TR. Robotic hand augmentation drives changes in neural body representation. Science Robotics. 2021;6(54).. Available from: https://www.science.org/doi/10.1126/scirobotics.abd7935
Eden J, Bräcklein M, Ibáñez J, Barsakcioglu DY, Di Pino G, Farina D, et al. Principles of human movement augmentation and the challenges in making it a reality. Nat Commun. 2022;13(1):1345. Available from: https://pubmed.ncbi.nlm.nih.gov/35292665/
Prattichizzo D, Pozzi M, Baldi TL, Malvezzi M, Hussain I, Rossi S, et al. Human augmentation by wearable supernumerary robotic limbs: Review and perspectives. Prog Biomed Eng. 2021;3:042005. Available from: https://iopscience.iop.org/article/10.1088/2516-1091/ac2294
Alicea B. An Integrative Introduction to Human Augmentation Science. 2018. Available from: https://arxiv.org/abs/1804.10521
Rueda J, Pugh J, Savulescu J. The morally disruptive future of reprogenetic enhancement technologies. Trends Biotechnol. 2023;41(5):589-592. Available from: https://pubmed.ncbi.nlm.nih.gov/36396521/
Raisamo R, Rakkolainen I, Majaranta P, Salminen K, Rantala J, Farooq A, Human Moore. Enhancing me: the hope and the hype of human enhancement. Chichester, UK: Wiley/Dana Centre; 2008.



 スキャンしてリンクを取得
スキャンしてリンクを取得

![a: The third Thumb of Cambridge University [8]; b: Extra hand for assembly tasks[10]. DoF augmentation concepts for motor augmentation.](https://www.igminresearch.jp/articles/figures/igmin212/igmin212.g001.png)