Welcome to IgMin Research – an Open Access journal uniting Biology, Medicine, and Engineering. We’re dedicated to advancing global knowledge and fostering collaboration across scientific fields.
At IgMin Research, we bridge the frontiers of Biology, Medicine, and Engineering to foster interdisciplinary innovation. Our expanded scope now embraces a wide spectrum of scientific disciplines, empowering global researchers to explore, contribute, and collaborate through open access.
Welcome to IgMin, a leading platform dedicated to enhancing knowledge dissemination and professional growth across multiple fields of science, technology, and the humanities. We believe in the power of open access, collaboration, and innovation. Our goal is to provide individuals and organizations with the tools they need to succeed in the global knowledge economy.
IgMin Publications Inc., Suite 102, West Hartford, CT - 06110, USA
Markov decision process is a dynamic programming algorithm that can be used to solve an optimization problem. It was used in applications like robotics, radar tracking, medical treatments, and decision-making. In the existing literature, the researcher only targets a few applications area of MDP. However, this work surveyed the Markov decision process’s application in various regions for solving optimization problems. In a survey, we compared optimization techniques based on MDP. We performed a comparative analysis of past work of other researchers in the last few years based on a few parameters. These parameters are focused on the proposed problem, the proposed methodology for solving an optimization problem, and the results and outcomes of the optimization technique in solving a specific problem. Reinforcement learning is an emerging machine learning domain based on the Markov decision process. In this work, we conclude that the MDP-based approach is most widely used when deciding on the current state in some environments to move to the next state.
Markov Decision Process is a computational model used for dynamic programming that guides decision-making in various use areas, such as stock control, scheduling, economics, and healthcare [1]. Al-Sheikh, et al. summarized the MDP usefulness in wireless networks. His analysis examines many uses of Markov Decision Process. In addition, various modulation techniques are compared and discussed to help use MDPs in Sensor Networks [2]. A variety of medical decision-making problems have been identified in MDPs. To improve cancer detection in the long term, Petousis, et al. portrayed an imaging screening method for repeated decision-making problems and made an MDP model. Although MDPs have still not been commonly applied to the medical field, such recent significant developments have shown that MDPs can be responsible for useful clinical tools [3]. The existing studies only focus on a few application areas of MDP. Still, this study overviews the many application areas of an MDP and discusses the results and strength of existing methods.
As in the MDP model, four states (S) and three control acts (A) describe the security:
The goal is to find the defender’s optimal procedure in which the defender wants to see what action needs to be taken in every single state to maximize rewards [4].
Markov decision model
The collaboration between an attacker and defender is differentiated equally by finite action. And states. Four tuple Markov Decision Processes (S, A, P, R) are represented by [5]:
S is a set of a finite number of states.
A is a finite number of actions to control.
P is the probability of one state to a new state.
R is estimated to receive rewards after the state changes immediately.
Basic components of MDP
Decision epochs: There are five essential components for all MDP models.
First, the decision-maker must decide how much a decision is made or if such choices are taken at predefined times or different intervals. The time a decision is made is called the decision epoch [6].
State spaces and states: Second, the decision maker must determine what relevant data needs to be tracked to make an informed decision.
At decision-epoch t, the current values of the relevant information are called the state (usually represented by st) and form the basis on which decisions are taken. The state space, S, is the set of all the system’s possible states [7]. Only the state must contain relevant information that changes from decision epoch to decision epoch. Directly use all other pertinent information as input into the model.
Action sets and action: Third, in each potential state of the system, it is necessary to determine what actions are available to the decision-maker [8]. The set of all possible actions in state st by term, 𝐴t𝑠tt.
Transition probabilities: Fourth component, if it did not consider the system’s evolution, an MDP would be a poor model for an SDP. Based on the present state and behavior, the transition probabilities determine the likelihood with which each potential state is visited at the next decision epoch [9]. To return to the inventory model again, the probability of change depends on the possibility of new demand and the action taken.
The next state is determined by st+1 = st+at-dt.
Where dt is a random variable representing new demand.
Cost functions or reward: Finally, taking a given action may result in a cost function or reward in a given state. It differentiates a good action from a poor one.
The reward function can be written by,
r(St, at, St+1) = f ([St + at – St+1]+) - 0(at) - h(st)
Here, O(a) represents the cost of ordering, h(st) signifies the cost of holding (if st is positive) or the cost of stocking (if it is negative), and f(st+at-stt+1) is the pivotal revenue from the procedures performed [10].
The above five components define an MDP model. The next step is to determine the best policy for the next decision.
MDP model functions
In MDP, an important property that needs to be addressed is the Markov property. It states that the impact of every action occupied in each state depends on the state and not upon earlier history and knowledge.
In MDP, policy π is mapping property from state toward actions:
π: S →A, policy determines every one process to proceed an action in every state respectively.
Reward value function: Reward value obtained starting from states and policy π. It is termed the state of the function value [11].
Where
P(s,π,s) is the probability of transition initially from state s and termination after policy π on states’.
R(s,π,s) is estimated to receive rewards when the transition has been followed.
γ a discount element.
The discount element in MDP, represented as γ ∈ (0,1), shows which part of the future reward vanished as compared to the present reward [12].
An optimal policy π is controlling action a ∈ A, which produces the function of max state value and is defined through the Bellman Equation for Optimality:
The optimal strategy can be achieved by solving the problem with Bellman Equation and MDP.
The cost impact on optimal policy: In the MDP, the optimal policy is controlled by manipulating rewards. In this model, they implement the cost factor concept and the expected reward as a result of the baseline reward R, subtracting the costs incurred by the activity during the change of state. Action will start with the attacker or defender [13]. Once the cost factor has been incorporated into the calculation, the Bellman equation is used.
Where, due to action a, C(s, a,s) is cost acquired following the state change from s to s. The given equation will help us evaluate the optimal strategy’s cost effect.
As an optimal strategy, the operation of a ∈{Wait, Defend, Reset}that generates the highest value will be chosen.
Applications
This section will discuss some applications of the Markov decision model. Table 1 shows the application of a Markov Decision Model.
Table 1: Application of Markov Decision Model.
Reference no.
Summary of problem
Objective Function
Comments
1. Population harvesting
Johnson [14]
Decisions on how many members of a population need to be left to breed for the next year must be taken annually.
Expected return on discounts over a finite number of years.
Actual population data are used, but return functions are assumed.
2. Agriculture
Reza [15]
Decisions about whether or not to apply treatment to protect a crop from pests must be made during the season.
The new states depend on rainfall at the next decision-making stage.
Planned expense, irrespective of the impact of pests, during the season.
Accurate data are used. The problem is a dynamic process and is solved via successive approximations.
3. Inspection, maintenance, and repair
P. G, et al. [16]
Decisions on which module operates in a multi-module system have to be taken. Each module should be tested when the system has been developed, and then which component should be tested.
The estimated time or cost of locating the fault.
The problem is described as a dynamic process.
Two models are considered: the first allows a module to be evaluated as a whole, and the second allows only component testing.
4. Finance and investment
Richard J [17]
An insurance company must make daily decisions about how much to invest and expend on its effective bank balance.
The new states depend on the decisions taken earlier.
Planned bank balance after a limited number of days.
Actual data is used for UK insurance providers. The problem is conceived as a finite-horizon, stochastic dynamic program.
5. Queues
Yuliya, et al. [18]
Suppose a customer exits or joins a multichannel queueing system. In that case, decisions about the price to be paid for the facility's operation must be made, which will impact the arrival rate.
Planned rewards over an infinite horizon per unit of time, where the rewards include customer payments and negative waiting costs for customers.
The problem is generated from a dynamic program in the finite-horizon semi-Markov.
6. Sales promotion
Harald J [19]
Decisions must be made regarding the commodity's price discount and duration.
Planned profit over a finite horizon, where profit is gross income net of penalty costs for missing the budget.
The problem is conceived as a finite-horizon stochastic dynamic program. No study is being attempted.
7. Search
Zhang [20]
Decisions must be made regarding which locations to search for a target. The new states rely on information from the search decision at the next decision epoch.
Expected costs before the goal is set, where the related costs are search costs and negative reward costs.
The problem is formulated as an absorbent-state stochastic dynamic program. The effects of structural policy are achieved.
8. Epidemics
Conesa D, et al.[21]
Decisions have to be made in an outbreak situation. The states at each decision epoch are the numbers in the population who are infected and can transmit the disease.
The expected cost during the epidemic period is irrespective of the social cost of the epidemic.
A remarkable transformation converts the continuous time problem into a finite-state stochastic dynamic program.
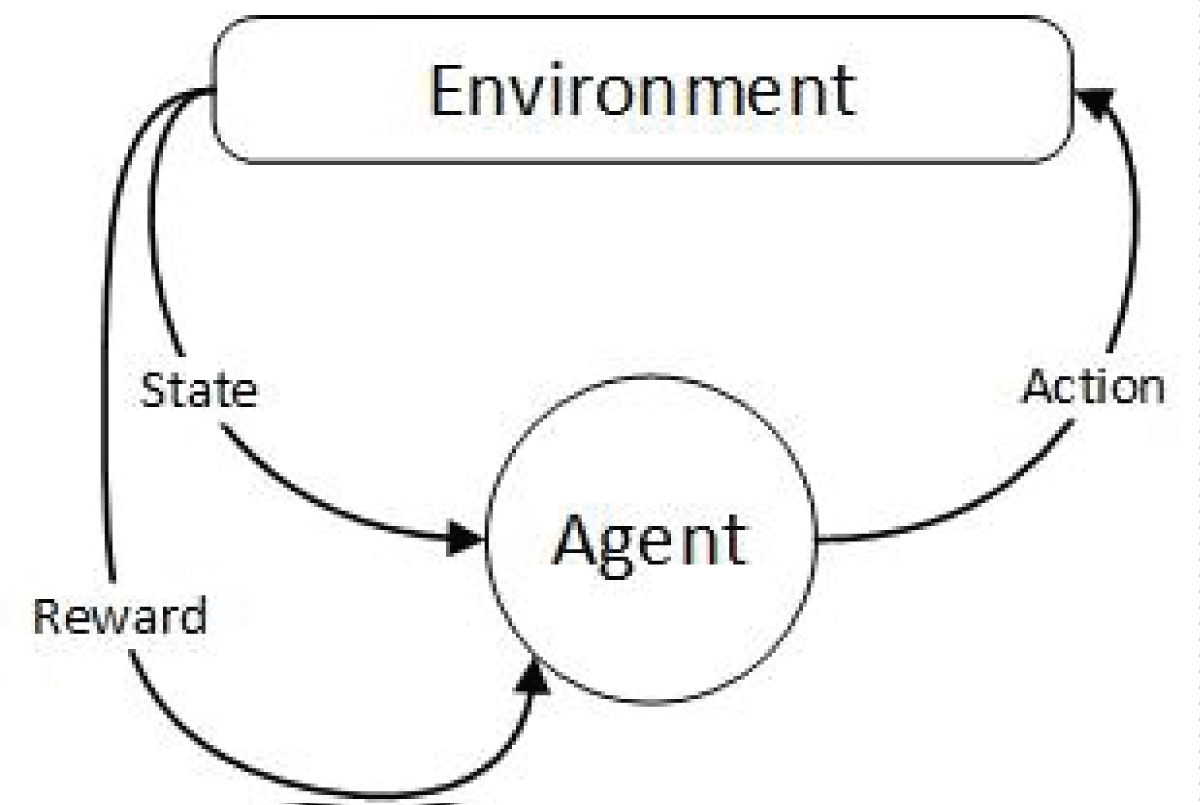
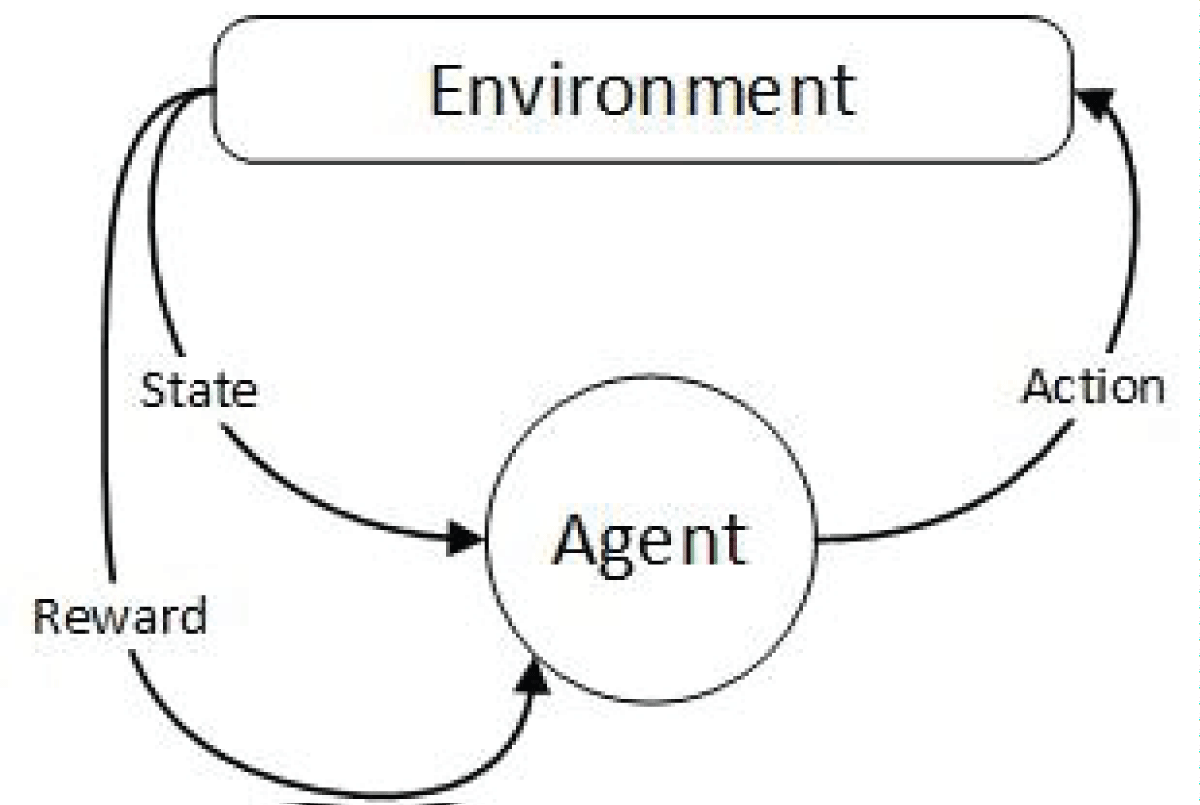
Working flow of MDP
The Markov decision process is a model of anticipated results. Like a Markov chain, the model endeavors to foresee a result based on the data given by the present status. Be that as it may, the Markov decision process consolidates the attributes of activities and inspirations. At each step during the cycle, the decision maker may select to take an action available in the current state, moving the model to the subsequent stage and offering the decision maker a reward. Figure 1 shows the working flow of the Markov decision process.
Figure 1 shows that an agent perceives the environment, takes the action, and moves to the next state. Agent receives a positive reward against the correct action and a negative reward against the wrong action.
The big challenge facing MDP theory has been called the curse of dimensionality. The state space size in many applications is too large to allow even modern computing capabilities to solve the MDP model directly. In an attempt to solve larger MDP models, a field of research called Approximate Dynamic Programming (ADP) has evolved in recent decades.
Proposed methodology for conducting the survey
In the past, researchers have used the Markov decision process to solve optimization problems. Some of the techniques are discussed here. In this article, we discuss the use and outcomes of MDP in different application areas. In this section, we compare MDP-based optimization techniques. This study collected papers on MDP from Google Scholar and discussed the details of each method. It evaluated each method based on several factors, such as the focus area, strengths, and weaknesses. This study categorized the existing method based on an application area. In Table 2, we discuss the enhancement of MDP and Reinforcement learning. Table 3 discusses the use of MDP in industry manufacturing and document retrieval. MDP is also used in the Finance and investment application area to identify the risk factors discussed in Table 4. In agriculture, water utilization is an essential factor for irrigation systems. MDP is used in agriculture application areas to make irrigation systems efficient. The researcher has previously worked on this area using MDP, which we discussed in Table 5.
Table 3: Use of MDP in industry manufacturing and document retrieval.
Reference no.
author/date
focus area and problem
methodology
Strength and result
Journal/Conference
31
Taylor W. Killian/2016
The author addresses the voltage violation problem using an optimal charging strategy model based on reinforcement learning.
In the situation of uncertain EV users' behaviors, the author uses the MDP approach
Ding verifies that this method can strictly guarantee voltage protection compared to conventional approaches.
30th Neural Information Processing Systems Conference, Barcelona, Spain (NIPS 2016).
32
Shuang Qiu/2020
In this paper, the author proposes a new primary-dual upper confidence algorithm for losses received and budget consumption control.
In this work, an upper confidence primal-dual algorithm is proposed
A new high-probability drift analysis of Lagrange multiplier processes is presented in this analysis.
34th Neural Information Processing Systems Conference, Vancouver, Canada (NeurIPS 2020).
33
Zeng Wei/ 7 Aug 2017
The author Proposed a Novel Model based on MDP to rank the document for the information retrieval system.
To train model parameters, the REINFORCE policy gradient algorithm is used.
MDPRank may outperform the state-of-the-art baselines.
“LETOR” benchmark datasets are used.
34
Ersin Selvi/2018
In this work, the Radar communications coexistence problem is examined
To solve the optimization problem, apply reinforcement learning
The proposed approach minimizes interference
IEEE
35
Aiwu Ruan/2019
In this paper, the author addresses the issue of SRAM FPGA interconnect resources coverage.
Reinforcement learning was used to tackle the issue of complete coverage issues for FPGAs
The experimental results show that configuration numbers can be optimized
IEEE Transactions on Circuits and Systems
36
Giuseppe De Giacomo /202
This study uses Markov Decision Processes to optimize device assignments in Digital Twins, adapting to uncertainty and improving cost and quality.
The methodology employs Markov Decision Processes inspired by Web service composition to automatically assign devices to manufacturing tasks.
Their proposed approach demonstrates optimal policies for device assignment in manufacturing tasks.
Computers in Industry
Table 4: Use of MDP in finance and investment.
Reference no.
Date/Author
Focus area
Methodology
Results and strength
Journal/ Conference
37
Chiao-Ting Chen
The author proposed a professional trading strategies system for finance investment in this work.
The author used an agent-based reinforcement learning approach. To improve the convergence, the trained model is transferred to DPN.
The experimental results show that this system reproduces almost eighty percent of trading decisions.
2018 IEEE International Conference on Agents (ICA)
38
Thomas W. Archibald
In this study, the writer analyzes the contract between the investor and the entrepreneur.
The MDP-based approach is used.
The theoretical results conclude that the investor and the entrepreneur are better off under the contract, and they also observe that the entrepreneur will take risky action when payment becomes harder
Annals of Operations Research
39
Yang Bai
Determine the investment strategy for gas exploration under such uncertainty
They proposed MDP to determine investment strategy.
They conclude the project is only feasible if the production capacity is more than 8.55 billion cubic meters. They also show that financial subsidies are beneficial for gas investments.
Energy Polic
40
Ali Nasir
They calculate the optimal decision policy for the trade of options, taking American options trading systems.
Markov decision process is used. MDP takes the conditional probabilities of the prices from various features.
The results conclude that there is an advantage for the financial community but not limited to the investors.
Computational Economics
Ref1
Ben Hambly
This study reviews recent developments and applications of reinforcement learning approaches in finance.
This paper introduces Markov decision processes as the foundation for reinforcement learning approaches in finance.
The study highlights successful applications of reinforcement learning algorithms in financial decision-making
Mathematical Finance
Table 5: Use of MDP in Agriculture.
Reference no.
Author/ Date
Focused Area
Methodology
Results and strength
Journal /Conference
41
Alan Marshall/2018
Generic irrigation system for efficient use of water in agriculture
MDP is used for creating automatic and precise irrigation
Experimental findings conclude that this approach outperforms as compare to threshold irrigation techniques by 40%
IEEE Conference
42
Fanyu Bu/2019
Introduced smart agriculture IoT-based system which contains four layers:
Data collection, data transmission, edge computing, and cloud computing layers
In this work, DRK is combined within the cloud layer to make decisions intelligently
They discuss the latest reinforcement learning models’ algorithms
Future Generation Computer Systems
43
Tran Kim Toai/2019
In this work, they give an efficient water utilization approach for agricultural soil land
They used MDP for efficient utilization of water in agriculture
By using this approach, water is supplied to the plants in good time. MDP utilizes 63% water and energy as compared to a threshold level
IEEE conference
Ref1
Weicheng Pan
This study focuses on designing a cooperative scheduling approach based on deep reinforcement learning to minimize makespan.
The methodology models agricultural machinery scheduling as an asymmetric multiple-traveling salesman problem with time windows.
The experimental results demonstrate that their proposed approach significantly outperforms existing modified baselines
Agriculture
Cloud computing is an emerging area of computer science. Efficient use of energy and data offloading is a problem in cloud computing. Researchers use MDP to solve data offloading issues, which we discussed some work in Table 6. In self-driving cars, a based approach is used for decision-making. In Table 7, we discussed the literature on the based approach in self-driving vehicles. The MDP-based framework is also used in management and maintenance areas. We discussed some literature on the topic of maintenance in Table 8.
Table 6: Use of MDP in cloud computing and computer networks.
Reference no.
Date/ Author
Focused area and problem
Methodology
Results and strength
Journal/Conference
44
Dongqing Liu/2017
They solve data offloading problems in mobile cloud computing
They used Hybrid offloading schemes to solve offloading problem
The experimental results show that this proposed approach solves the problem with minimal cost.
IEEE Conference
45
Mengyu Li/2020
In this work, the author solves an ambulance offloading problem for the Emergency department.
MDP-based policy iteration algorithm is used in this work
This study significantly reduces the AOD time for bed patients
Omega
46
Juan Parras/2019
They address two WSN problems: the problem of optimality and the problem of ad-hoc defense
They used MDP and DRL as frameworks.
An attacker, by using the MDP tool, will successfully exploit these problems and also degrade the defense system
Expert Systems with Applications
47
Xiaobin Li/2020
Introduce the machine matching tool for single manufacturing task
MDP and cross-entropy-based approaches are used
The experimental results of the proposed method show its superiority and usability.
Robotics and Computer Integrated Manufacturing
48
Zhihua Li/2019
In this work author addresses the problem of overload threshold selection to determine whether the host node is overloaded or not
In this work, they Modeled overload threshold selection as an MDP
The experimental results show that the overload threshold is selected adaptively selected
Cluster Computing
49
Shamim Yousefia/2020
In this paper, the mobile software agent concept is introduced for data aggregation on the Internet of Things
This work is divided into two stages there are: cluster the devices and organize the cluster heads using the Markov decision process
The experimental results show the proposed approach improves data transmission delay, energy consumption, and reliability of the devices
Ad Hoc Networks 98
50
Laurent L. Njilla/2017
In this study, Resource allocation for cyber security is investigated in terms of recovery and agility
They proposed the Markov decision process as a framework for resource reallocations
The experimental results conclude that the optimal allocations take the gains from investing in the recovery component
IEEE conference
Ref1
Behzad Chitsaz /2024
This study focuses on developing a multi-level continuous-time Markov decision process (CTMDP) model for efficient power management in multi-server data centers.
The methodology involves developing a multi-level continuous-time Markov decision process (CTMDP) model based on state aggregation.
The simulation results show that the proposed multi-level CTMDP model achieves a near 50% reduction.
IEEE Transactions on Services Computing
Table 7: Use of MDP in self-driving cars.
Reference no.
Date/ Author
Focused area and problem
Methodology
Results and strength
Journal/Conference
51
Jingliang Duan/2019
In this work, Jingliang Duan at. el introduced the hierarchical RL technique for decision-making in self-driving cars, which is not
They first divide the driving task into three parts: left lane change, right lane change, and driving in the lane, and then learn the sub-policy for each maneuver using hierarchical reinforcement learning
This method is applied to a highway scenario. Experiments conclude that this approach realizes safe and smooth decision-making.
IET Intelligent Transport Systems
52
Mohsen Kamrani /2020
In this work, the author understands driving behavior in terms of maintaining speed decisions, acceleration, and deceleration
Individual drivers’s reward functions are estimated using the multinomial logit model and used in the MDP framework. The value iteration algorithm is used for policy-obtaining
The experimental results show that the driver prefers to accelerate when the number of objects around the host is increasing
Transportation Research
53
Xuewei Qi/ 2018;
The energy management system is introduced to learn autonomously optimal fuel split between the traffic environment and the vehicle
A deep Reinforcement learning-based approach has been applied to energy management in autonomous vehicles.
The experimental findings demonstrate that this DQN model saved 16.3% of energy as compared to conventional binary control strategies.
Transportation Research Part
54
Shalini Ghosh/ 2018
Shalini Ghosh et. al., introduced a paradigm to make machine learning models more trustworthy for self-driving cars and cybersecurity.
They applied MDP as the underlying dynamic model and outlined three paradigm approaches: Data repair, model repair, and reward repair
They demonstrate their approaches to car controllers for obstacle avoidance and query routing controllers.
IEEE Conference
Ref1
YUHO SONG/2023
This study proposes a behavior planning algorithm for self-driving vehicles, utilizing a hierarchical Markov Decision Process (MDP).
The methodology employs a hierarchical Markov Decision Process (MDP) with a path planning MDP that generates path candidates based on lane-change data and speed profiling.
Simulation results demonstrate the effectiveness of the proposed algorithm in various cut-in scenarios.
IEEE Access
Table 8: Use of MDP in Maintenance.
Reference no.
Date/ Author
Focused area and problem
Methodology
Results and strength
Journal/Conference
55
Mariana de Almeida Costa/ 2020
In this work, the author estimates the survival curve and wheel wear rates of Portuguese train operating company
Markov decision-based framework is applied to find the optimal policy.
The experimental results conclude that training operating companies in practice might benefit from using policy.
Wiley and Francis
56
Yinhui Ao/2019
This paper proposed a solution to the integrated decision problem of maintenance and production for the semiconductor production line
They developed a dynamic maintenance plan based on MDP, and then the decision model of production scheduling was put forward to the entire semiconductor line
The experimental results show that this method enhances system benefits and usability of critical components.
Computers & Industrial Engineering
57
Ayca Altay/2019
In this article, Ayca Altay at. el present a new technique to predict geometry and rail defects and integrate prediction with inspection
They proposed a new technique, a hybrid prediction methodology, and a novel use of risk aversion. The discounted MDP model is used to find the optimal inspection and maintenance scheduling policies
The experimental results showed the highest accuracy rate in effective long-term scheduling and prediction
Transportation Research
Ref0
Giacomo Arcieri /2024
This study combines deep reinforcement learning with Markov Chain Monte Carlo sampling to robustly solve POMDP
They jointly infer the model parameters via Markov Chain Monte Carlo sampling and solve POMDPs for maintaining railway assets.
The experimental results show that the RL policy learned by their method outperforms the current real-life policy by reducing the maintenance and planning cost for railway assets
Machine Learning
Comparative analysis of existing MDP methods
Enhancement of MDP and reinforcement learning: In this paper, Chi Cheung [22] addresses the issue of undisputed reinforcement learning in Markov decision-making processes in a non-stationary environment. First, he generates a Sliding Window upper confidence bound to the algorithm of Confidence Widening and generates his dynamic regret bound by knowing the budget for variation. To achieve the same dynamic regret without knowing the budgets for variation. It also suggests that the Bandit over RL algorithm be recursively tuned to the sliding window upper-confidence bound algorithm. The main feature of this algorithm is the new confidence-enhancing method, which gives added optimism to the design of the learning algorithms. In this paper [23], the Authors updated the HiP-MDP framework as the existing framework had a critical issue in that embedding uncertainty was designed independent of the agent’s state. Killian extends the framework to develop personalized medicine strategies for HIV treatment. Experiment results show that HiP-MDP effectively learns treatment strategies that comply with the naive “personally-tailored” basis but rely on much fewer data. HiP-MDP also performs better with the baseline one-size-fits-all. This paper proposes a general theory of regularized Markov decision processes [24], classifying these approaches in two ways. He considers a large class of regularization and then transforms these classes into two policy iterative processes and value iteration. This approach enables general algorithmic schemes to be analyzed for error propagation. Chen-Yu [25] proposed two model-free algorithms for learning infinite-horizon average reward MDP. The first approach solves the discounted incentive problem and achieves O (T 2/3). The second algorithm includes recent O (T 1/2) function selection advances. In this paper, Wachi [26] proposes an SNO-MDP algorithm that searches and improves Markov decision processes within unfamiliar safety constraints. In this method, an agent learns safety constraints and then enhances the collective reward in the certified safe region. It provides imaginary assurances of satisfaction with the safety and regularity constraints. Experiments show the efficiency of SNO-MDP using two tests: one test uses unreal data in an open environment called GP-SAFETYGYM, and the other test simulates Mars surface exploration through actual observation data. Ensure robustness in Markov decision processes (MDP) is addressed in an article by the Author to ensure robustness concerning unexpected or adversarial system behavior by using an online learning approach [27]. In this paper, Tuyen P. Le studied hierarchical RL in the POMDP, in which the tasks are only partially measurable and possess hierarchical properties. A hierarchical deep reinforcement learning approach is proposed in the hierarchical POMDP. A deep hierarchical RL algorithm is proposed for MDP and POMDP learning domains. They evaluate the proposed algorithm using a variety of challenging hierarchical POMDPs [28]. In Contextual Markov Decision Processes, environments chosen from a possibly infinite set agent have an episodic sequence of tabular interactions. The parameters of these environments depend on the background vector available to the agent at the beginning of each episode. In this thesis, the Author proposed a noregret online RL algorithm in the setting where the MDP parameters are extracted from the context using generalized linear models. This method relies on efficient web updates and memory efficiency [29]. A sparse Markov decision technique with novel causal sparse Tsallis entropy regularization is proposed. The suggested policy regularization causes a sparse and multimodal optimal policy distribution of the sparse MDP.
In comparison to soft MDPs that use the regularization of causal entropy, the proposed sparse MDP. They show that a sparse MDP’s output error has a constant bound, while a soft MDP’s error increases. Where the performance error is caused by the time of implementation of the regularization. In tests, they use sparse MDPs to reinforce learning challenges. The method proposed outperforms current methods in terms of convergence speed and efficiency [30]. Table 2 shows the comparative analysis of Markov Decision Process Model.
Use of MDP in industry manufacturing and document retrieval
Tao Ding proposes [31] using the MDP approach in the scenario of uncertain EV users’ behaviors. Ding identifies that this approach strictly guarantees voltage protection, but the conventional stochastic approach cannot. The MDP and the online learning techniques can fully consider the temporal correlations. Shuang Qiu [32] proposes a different upper confidence primal-dual algorithm. He only needs to sample from the transition model. The proposed algorithm achieves the upper bounds of both the constraint and regret violation. His proposed model does not require transition models of the MDPs.
In this article, the author addresses the problem of document ranking for information retrieval. The basis of MDP, referred to as MDP Rank is a novel learning to rank the novel by author. Rank is a document for the corresponding position in the learning phase of MDP. The construction of a document ranking is considered sequential decision-making; each corresponds to an action of selecting. The model parameters are adopted to train the policy gradient algorithm of REINFORCE [33]. In this article, they examine an MDP and then apply reinforcement learning to solve the optimization problem of the radar-communications coexistence problem by modeling the radar environment. They demonstrate how the reinforcement learning and MDP framework can be used to help the radar predict which bands the interferer will use and utilize bands that minimize interference, which will the radar optimize between range resolution and SINR [34]. SRAM FPGAs have been an obstacle to the complete coverage of integrated tools for science and engineering topics such as testing diagnostics and fault tolerance. SRAM FPGAs have been an obstacle to the complete coverage of integrated tools for science and engineering topics such as testing, diagnostics, and fault tolerance. The simple requirement to cover as many interconnect resources as possible with minimum configuration numbers should be followed. FPGAs have been achieved by resolving the MDP with Dynamic Programming for Maximum Interconnect Resource Coverage. Experimental findings show that configuration numbers can be configured to reach a theoretical number with maximum coverage achieved, and the technique is also applicable to NP-complete issues such as FPGA checking. [35]. In episodic loop-free Markov processes (MDPs), where the error function may differ dynamically between episodes, Rosenberg perceives online learning, and the transition function is unknown to the learner. He shows the regret of O (L|X|(|A|T) 1/2 using the methodology of entropic regularization. Rosenberg’s online algorithm has been implemented, which enables the initial oppositional MDP model to be extended to handle curved performance criteria and also improves the previous limit of regret [36]. Table 3 shows the comparative analysis of MDP in manufacturing and document retrieval in industry. Tables 4,5 present a comparative study of MDP for finance and agriculture. Tables 6-8 describe the comparative analysis of MDP for cloud computing and computer networks, self-driving cars, and maintenance, respectively.
This survey comprehensively reviews Markov decision processes (MDPs) application in various optimization domains such as the manufacturing industry, document retrial, cloud computing, networks, agriculture, finance, maintenance, and planning. The comparative analysis of past works highlights the effectiveness of MDP-based methods in handling complex decision-making tasks. MDPs offer robust solutions for dynamic and uncertain environments. Besides the advantages of a MDP, some challenges still need to be addressed. These challenges are the scalability of MDP, robustness to uncertainty, explainability, and interpretability. Future research can focus on developing scalable MDP algorithms and needs to enhance the robustness by utilizing the probabilistic models and Bayesian method. It helps to address the uncertainty in transition probabilities and reward functions. There is also a need to focus on the explainability and interpretability of MDP-based models because they provide insights that can help decisions.
Dynamic programming has different applications in real-world problems. We used Dynamic programming, where we had multiple solutions and selected the best from the various solutions. Dynamic Programming’s algorithm Markov decision process is used in decision making. In this work, we surveyed MDP-based optimization algorithms that can be used to solve optimization problems. We briefly discussed the application areas where the Markov decision process is used to learn an optimal policy for decision-making, like self-driving cars. In autonomous vehicles, the MDP-based approach makes proper decisions at the right time to avoid obstacles like pedestrians and other vehicles. MDP solves data offloading problems and resource allocations in computer networks and cloud computing. From the Literature survey, we conclude that MDP techniques are used in robotics, self-driving cars, radar tracking, finance and investment, agriculture, and fault tolerance in industry manufacturing for taking optimized action in an environment.
We make a comparative analysis of the focused problem area, methodology, and strength of the results. In the future, we may improve this survey by using another matrix for comparison, such as drawbacks/weaknesses of techniques. In our survey, we added twelve application areas of MDP, but in the future, we may add more application areas like forestry management and flight scheduling. We classify our literature based on application areas taxonomy, but in the future, we may classify this literature on other types of taxonomy [58-63].
Goyal V, Grand-Clement J. Robust Markov decision processes: Beyond rectangularity. Math Oper Res. 2023;48(1):203-26. Available from: https://dl.acm.org/doi/10.1287/moor.2022.1259
Alsheikh MA, Lin S, Niyato D, Tan HP, Han Z. Markov decision processes with applications in wireless sensor networks: A survey. IEEE Commun Surv Tutor. 2015;17(3):1239-67. Available from: https://arxiv.org/abs/1501.00644
Bazrafshan N, Lotfi MM. A finite-horizon Markov decision process model for cancer chemotherapy treatment planning: an application to sequential treatment decision making in clinical trials. Ann Oper Res. 2020;295(1):483-502. Available from: https://ideas.repec.org/a/spr/annopr/v295y2020i1d10.1007_s10479-020-03706-5.html
Yao Q, Guo X, Wang Y, Liang H, Wu K. Adversarial decision-making for moving target defense: a multi-agent Markov game and reinforcement learning approach. Entropy. 2023;25(4):605. Available from: https://pubmed.ncbi.nlm.nih.gov/37190393/
Zheng J. Optimal policy for dynamically changing system controls in moving target defense [dissertation]. 2020. Available from: https://ttu-ir.tdl.org/items/26335752-875d-4219-a0eb-795dd653bf78
Zhang SP, Suen SC, Sundaram V, Gong CL. Quantifying the benefits of increasing decision-making frequency for health applications with regular decision epochs. IISE Trans. 2024:1-15. Available from: https://www.tandfonline.com/doi/pdf/10.1080/24725854.2024.2321492
Bozkus T, Mitra U. Link analysis for solving multiple-access MDPs with large state spaces. IEEE Trans Signal Process. 2023;71:947-62. Available from: https://ieeexplore.ieee.org/document/10078382/authors#authors
Xu Z, Song Z, Shrivastava A. A tale of two efficient value iteration algorithms for solving linear MDPs with large action space. In: International Conference on Artificial Intelligence and Statistics. PMLR; 2023;206:788-836. Available from: https://proceedings.mlr.press/v206/xu23b.html
Ghatrani Z, Ghate A. Inverse Markov decision processes with unknown transition probabilities. IISE Trans. 2023;55(6):588-601. Available from: https://www.tandfonline.com/doi/full/10.1080/24725854.2022.2103755
Low SM, Kumar A, Sanner S. Safe MDP planning by learning temporal patterns of undesirable trajectories and averting negative side effects. In: Proceedings of the International Conference on Automated Planning and Scheduling. 2023;33(1). Available from: https://doi.org/10.48550/arXiv.2304.03081
Wang Y, Xu Z, Liu Y, Chen X, Qiu S, Yu Y. Robust average-reward Markov decision processes. In: Proceedings of the AAAI Conference on Artificial Intelligence. 2023;37(12): AAAI-23 Special Tracks. Available from: https://doi.org/10.1609/aaai.v37i12.26775
Valeev S, Kondratyeva N. Large scale system management based on Markov decision process and big data concept. In: 2016 IEEE 10th International Conference on Application of Information and Communication Technologies (AICT). IEEE; 2016. Available from: https://ieeexplore.ieee.org/document/7991829
Winder J. Concept-aware feature extraction for knowledge transfer in reinforcement learning. In: AAAI Workshops. 2018. Available from: https://cdn.aaai.org/ocs/ws/ws0470/16910-76005-1-PB.pdf
Johnson FA, Fackler PL, Boomer GS, Zimmerman GS, Williams BK, Nichols JD, et al. State-dependent resource harvesting with lagged information about system states. PLoS One. 2016;11(6). Available from: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0157494
Pourmoayed R, Nielsen LR, Kristensen AR. A hierarchical Markov decision process modeling feeding and marketing decisions of growing pigs. Eur J Oper Res. 2016;250(3):925-938. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0377221715008802
Morato PG, Papakonstantinou KG, Andriotis CP, Nielsen JS, Rigo P. Optimal inspection and maintenance planning for deteriorating structures through dynamic Bayesian networks and Markov decision processes. 2021. Available from: https://arxiv.org/abs/2009.04547
Boucherie RJ, Van Dijk NM. Markov decision processes in practice. Switzerland: Springer; 2017;248. Available from: https://research.utwente.nl/en/publications/markov-decision-processes-in-practice
Butkova Y, Hatefi H, Hermanns H, Krcal J. Optimal continuous time Markov decisions. In: International Symposium on Automated Technology for Verification and Analysis. Springer, Cham; 2015. Available from: https://arxiv.org/abs/1507.02876
Van Heerde HJ, Neslin SA. Sales promotion models. In: Handbook of Marketing Decision Models. Springer, Cham; 2017;13-77. Available from: https://ideas.repec.org/h/spr/isochp/978-3-319-56941-3_2.html
Zhang Z, Tian Y. A novel resource scheduling method of netted radars based on Markov decision process during target tracking in clutter. EURASIP J Adv Signal Process. 2016;2016:9. Available from: https://www.infona.pl/resource/bwmeta1.element.springer-doi-10_1186-S13634-016-0309-3
Conesa D, Martínez-Beneito MA, Amorós R, López-Quílez A. Bayesian hierarchical Poisson models with a hidden Markov structure for the detection of influenza epidemic outbreaks. Stat Methods Med Res. 2015 Apr;24(2):206-23. Available from: https://pubmed.ncbi.nlm.nih.gov/21873301/
Cheung WC, Simchi-Levi D, Zhu R. Reinforcement learning for non-stationary Markov decision processes: The blessing of (more) optimism. 2020. Available from: https://arxiv.org/abs/2006.14389
Killian T, Konidaris G, Doshi-Velez F. Transfer learning across patient variations with hidden parameter Markov decision processes. 2016. Available from: https://arxiv.org/pdf/1612.00475
Geist M, Scherrer B, Pietquin O. A theory of regularized Markov decision processes. 2019. Available from: https://arxiv.org/abs/1901.11275
Wei CY, Jafarnia-Jahromi M, Luo H, Sharma H, Jain R. Model-free reinforcement learning in infinite-horizon average-reward Markov decision processes. 2019. Available from: https://arxiv.org/abs/1910.07072
Wachi A, Sui Y. Safe reinforcement learning in constrained Markov decision processes. 2020. Available from: https://arxiv.org/abs/2008.06626
Lim SH, Xu H, Mannor S. Reinforcement learning in robust Markov decision processes. Math Oper Res. 2016;41(4):1325-53. Available from: https://pubsonline.informs.org/doi/abs/10.1287/moor.2016.0779
Le TP, Vien NA, Chung TC. A deep hierarchical reinforcement learning algorithm in partially observable Markov decision processes. IEEE Access. 2018;6:49089-102. Available from: https://ieeexplore.ieee.org/document/8421749
Modi A, Tewari A. Contextual Markov decision processes using generalized linear models. 2019. Available from: https://openreview.net/pdf?id=Bklh0SiQiN
Lee K, Choi S, Oh S. Sparse Markov decision processes with causal sparse Tsallis entropy regularization for reinforcement learning. 2017. Available from: https://arxiv.org/abs/1709.06293
Ding T, Zeng Z, Bai J, Qin B, Yang Y, Shahidehpour M. Optimal electric vehicle charging strategy with Markov decision process and reinforcement learning technique. IEEE Trans Ind Appl. 2020;56(5):5811-23. Available from: https://vbn.aau.dk/ws/portalfiles/portal/331224034/final.pdf
Wang Z, Qiu S, Wei X, Yang Z, Ye J. Upper confidence primal-dual reinforcement learning for CMDP with adversarial loss. In: Adv Neural Inf Process Syst. 2020;33. Available from: https://arxiv.org/abs/2003.00660
Wei Z, Xu J, Lan Y, Guo J, Cheng X. Reinforcement learning to rank with Markov decision process. In: Proceedings of the 40th International ACM SIGIR Conference on Research and Development in Information Retrieval; 2017:945-948. Available from: https://dl.acm.org/doi/10.1145/3077136.3080685
Selvi E, Buehrer RM, Martone A, Sherbondy K. On the use of Markov decision processes in cognitive radar: An application to target tracking. In: 2018 IEEE Radar Conference (RadarConf18). IEEE; 2018. Available from: https://ieeexplore.ieee.org/document/8378616
Ruan A, Shi A, Qin L, Xu S, Zhao Y. A reinforcement learning-based Markov-Decision Process (MDP) implementation for SRAM FPGAs. IEEE Trans Circuits Syst. 2020;67:2124-2128. Available from: https://ieeexplore.ieee.org/document/8850046
De Giacomo G, Calvanese D, Dalmonte T, De Masellis R, Orsi G. Digital twin composition in smart manufacturing via Markov decision processes. Comput Ind. 2023;149:103916. Available from: https://www.sciencedirect.com/science/article/pii/S0166361523000660
Rosenberg A, Mansour Y. Online convex optimization in adversarial Markov decision processes. 2019. Available from: https://arxiv.org/abs/1905.07773
Chen CT, Chen AP, Huang SH. Cloning strategies from trading records using agent-based reinforcement learning algorithm. In: 2018 IEEE International Conference on Agents (ICA); 2018 Jul; IEEE. p. 34-37. Available from: https://ieeexplore.ieee.org/document/8460078
Archibald TW, Possani E. Investment and operational decisions for start-up companies: a game theory and Markov decision process approach. Ann Oper Res. 2019:1-14.
Bai Y, Meng J, Meng F, Fang G. Stochastic analysis of a shale gas investment strategy for coping with production uncertainties. Energy Policy. 2020;144:111639. Available from: https://ideas.repec.org/a/eee/enepol/v144y2020ics0301421520303748.html
Nasir A, Khursheed A, Ali K, Mustafa F. A Markov Decision Process Model for Optimal Trade of Options Using Statistical Data. Comput Econ. 2020;58:327-346. Available from: https://link.springer.com/article/10.1007/s10614-020-10030-4
Hambly B, Xu R, Yang H. Recent advances in reinforcement learning in finance. Math Finance. 2023;33(3):437-503. Available from: https://onlinelibrary.wiley.com/doi/epdf/10.1111/mafi.12382
Huong TT, Thanh NH, Van NT, Dat NT, Van Long N, Marshall A. Water and energy-efficient irrigation based on Markov decision model for precision agriculture. In: 2018 IEEE Seventh International Conference on Communications and Electronics (ICCE); 2018 Jul; IEEE. p. 51-56. Available from: https://ieeexplore.ieee.org/document/8465723
Bu F, Wang X. A smart agriculture IoT system based on deep reinforcement learning. Future Gener Comput Syst. 2019;99:500-507. Available from: https://typeset.io/papers/a-smart-agriculture-iot-system-based-on-deep-reinforcement-226i9iipdo?citations_has_pdf=true
Toai TK, Huan VM. Implementing the Markov Decision Process for Efficient Water Utilization with Arduino Board in Agriculture. In: 2019 International Conference on System Science and Engineering (ICSSE); 2019 Jul; IEEE. p. 335-340. Available from: https://ieeexplore.ieee.org/document/8823432
Pan W, Wang J, Yang W. A cooperative scheduling based on deep reinforcement learning for multi-agricultural machines in emergencies. Agriculture. 2024;14(5):772. Available from: https://www.mdpi.com/2077-0472/14/5/772
Liu D, Khoukhi L, Hafid A. Data offloading in mobile cloud computing: A Markov decision process approach. In: 2017 IEEE International Conference on Communications (ICC); 2017 May; IEEE. p. 1-6. Available from: https://ieeexplore.ieee.org/document/7997070
Li M, Carter A, Goldstein J, Hawco T, Jensen J, Vanberkel P. Determining Ambulance Destinations When Facing Offload Delays Using a Markov Decision Process. Omega. 2021;101:102251. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0305048319308229
Parras J, Zazo S. Learning attack mechanisms in wireless sensor networks using Markov decision processes. Expert Syst Appl. 2019;122:376-387. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0957417419300235
Li X, Fang Z, Yin C. A machine tool matching method in cloud manufacturing using Markov Decision Process and cross-entropy. Robot Comput Integr Manuf. 2020;65:101968. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0736584519300924
Li Z. An adaptive overload threshold selection process using Markov decision processes of virtual machine in cloud data center. Clust Comput. 2019;22(2):3821-3833. Available from: https://link.springer.com/article/10.1007/s10586-018-2408-4
Yousefi S, Derakhshan F, Karimipour H, Aghdasi HS. An efficient route planning model for mobile agents on the Internet of Things using Markov decision process. Ad Hoc Netw. 2020;98:102053. Available from: https://www.sciencedirect.com/science/article/abs/pii/S1570870519309527
Njilla LL, Kamhoua CA, Kwiat KA, Hurley P, Pissinou N. Cyber security resource allocation: a Markov decision process approach. In: 2017 IEEE 18th International Symposium on High Assurance Systems Engineering (HASE); 2017 Jan; IEEE. p. 49-52. Available from: https://ieeexplore.ieee.org/abstract/document/7911870/
Chitsaz B, Cosenza B, Gupta V, Thain D, Mackay S. Scaling power management in cloud data centers: A multi-level continuous-time MDP approach. IEEE Trans Serv Comput. 2024;1-12. Available from: https://ieeexplore.ieee.org/abstract/document/10400800
Duan J, Lv C, Xing Y, Du H, Cheng B, Sangiovanni-Vincentelli AL. Hierarchical reinforcement learning for self-driving decision-making without reliance on labeled driving data. IET Intell Transp Syst. 2020;14(5):297-305. Available from: https://ietresearch.onlinelibrary.wiley.com/doi/full/10.1049/iet-its.2019.0317
Kamrani M, Rakha H, Ma Y. Applying Markov decision process to understand driving decisions using basic safety messages data. Transp Res Part C Emerg Technol. 2020;115:102642. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X20305490
Qi X, Jiang R, Li K, Wang W, Qi J. Deep reinforcement learning enabled self-learning control for energy-efficient driving. Transp Res Part C Emerg Technol. 2019;99:67-81. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X18318862
Ghosh S, Topcu U, Chong E, Etigowni S, Fainekos G, Kakade U. Model, data and reward repair: Trusted machine learning for Markov Decision Processes. In: 2018 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W); 2018; IEEE. Available from: https://ieeexplore.ieee.org/abstract/document/8416249
Song Y, Han S, Huh K. A self-driving decision making with reachable path analysis and interaction-aware speed profiling. IEEE Access. 2023;11:122302-122314. Available from: https://ieeexplore.ieee.org/abstract/document/10301421
de Almeida Costa M, de Azevedo Peixoto Braga JP, Ramos Andrade A. A data-driven maintenance policy for railway wheelsets based on survival analysis and Markov decision process. Qual Reliab Eng Int. 2021;37:176-198. Available from:
Ao Y, Zhang H, Wang C. Research of an integrated decision model for production scheduling and maintenance planning with economic objectives. Comput Ind Eng. 2019;137:106092. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0360835219305613
Gerum PCL, Altay A, Baykal-Gürsoy M. Data-driven predictive maintenance scheduling policies for railways. Transp Res Part C Emerg Technol. 2019;107:137-154. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X18314918
Arcieri G, Masegosa AD, Stella F, Vercellis C. POMDP inference and robust solution via deep reinforcement learning: An application to railway optimal maintenance. Mach Learn. 2024:1-29. Available from: https://link.springer.com/article/10.1007/s10994-024-06559-2
Address Correspondence: Qazi Waqas Khan, Department of Computer Engineering, Jeju National University, Jejusi 63243, Jeju Special Self-Governing Province, Republic of Korea, Email: [email protected]
How to cite this article: Khan QA. Exploring Markov Decision Processes: A Comprehensive Survey of Optimization Applications and Techniques. IgMin Res. Jul 04, 2024; 2(7): 508-517. IgMin ID: igmin210; DOI:10.61927/igmin210; Available at: igmin.link/p210
Goyal V, Grand-Clement J. Robust Markov decision processes: Beyond rectangularity. Math Oper Res. 2023;48(1):203-26. Available from: https://dl.acm.org/doi/10.1287/moor.2022.1259
Alsheikh MA, Lin S, Niyato D, Tan HP, Han Z. Markov decision processes with applications in wireless sensor networks: A survey. IEEE Commun Surv Tutor. 2015;17(3):1239-67. Available from: https://arxiv.org/abs/1501.00644
Bazrafshan N, Lotfi MM. A finite-horizon Markov decision process model for cancer chemotherapy treatment planning: an application to sequential treatment decision making in clinical trials. Ann Oper Res. 2020;295(1):483-502. Available from: https://ideas.repec.org/a/spr/annopr/v295y2020i1d10.1007_s10479-020-03706-5.html
Yao Q, Guo X, Wang Y, Liang H, Wu K. Adversarial decision-making for moving target defense: a multi-agent Markov game and reinforcement learning approach. Entropy. 2023;25(4):605. Available from: https://pubmed.ncbi.nlm.nih.gov/37190393/
Zheng J. Optimal policy for dynamically changing system controls in moving target defense [dissertation]. 2020. Available from: https://ttu-ir.tdl.org/items/26335752-875d-4219-a0eb-795dd653bf78
Zhang SP, Suen SC, Sundaram V, Gong CL. Quantifying the benefits of increasing decision-making frequency for health applications with regular decision epochs. IISE Trans. 2024:1-15. Available from: https://www.tandfonline.com/doi/pdf/10.1080/24725854.2024.2321492
Bozkus T, Mitra U. Link analysis for solving multiple-access MDPs with large state spaces. IEEE Trans Signal Process. 2023;71:947-62. Available from: https://ieeexplore.ieee.org/document/10078382/authors#authors
Xu Z, Song Z, Shrivastava A. A tale of two efficient value iteration algorithms for solving linear MDPs with large action space. In: International Conference on Artificial Intelligence and Statistics. PMLR; 2023;206:788-836. Available from: https://proceedings.mlr.press/v206/xu23b.html
Ghatrani Z, Ghate A. Inverse Markov decision processes with unknown transition probabilities. IISE Trans. 2023;55(6):588-601. Available from: https://www.tandfonline.com/doi/full/10.1080/24725854.2022.2103755
Low SM, Kumar A, Sanner S. Safe MDP planning by learning temporal patterns of undesirable trajectories and averting negative side effects. In: Proceedings of the International Conference on Automated Planning and Scheduling. 2023;33(1). Available from: https://doi.org/10.48550/arXiv.2304.03081
Wang Y, Xu Z, Liu Y, Chen X, Qiu S, Yu Y. Robust average-reward Markov decision processes. In: Proceedings of the AAAI Conference on Artificial Intelligence. 2023;37(12): AAAI-23 Special Tracks. Available from: https://doi.org/10.1609/aaai.v37i12.26775
Valeev S, Kondratyeva N. Large scale system management based on Markov decision process and big data concept. In: 2016 IEEE 10th International Conference on Application of Information and Communication Technologies (AICT). IEEE; 2016. Available from: https://ieeexplore.ieee.org/document/7991829
Winder J. Concept-aware feature extraction for knowledge transfer in reinforcement learning. In: AAAI Workshops. 2018. Available from: https://cdn.aaai.org/ocs/ws/ws0470/16910-76005-1-PB.pdf
Johnson FA, Fackler PL, Boomer GS, Zimmerman GS, Williams BK, Nichols JD, et al. State-dependent resource harvesting with lagged information about system states. PLoS One. 2016;11(6). Available from: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0157494
Pourmoayed R, Nielsen LR, Kristensen AR. A hierarchical Markov decision process modeling feeding and marketing decisions of growing pigs. Eur J Oper Res. 2016;250(3):925-938. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0377221715008802
Morato PG, Papakonstantinou KG, Andriotis CP, Nielsen JS, Rigo P. Optimal inspection and maintenance planning for deteriorating structures through dynamic Bayesian networks and Markov decision processes. 2021. Available from: https://arxiv.org/abs/2009.04547
Boucherie RJ, Van Dijk NM. Markov decision processes in practice. Switzerland: Springer; 2017;248. Available from: https://research.utwente.nl/en/publications/markov-decision-processes-in-practice
Butkova Y, Hatefi H, Hermanns H, Krcal J. Optimal continuous time Markov decisions. In: International Symposium on Automated Technology for Verification and Analysis. Springer, Cham; 2015. Available from: https://arxiv.org/abs/1507.02876
Van Heerde HJ, Neslin SA. Sales promotion models. In: Handbook of Marketing Decision Models. Springer, Cham; 2017;13-77. Available from: https://ideas.repec.org/h/spr/isochp/978-3-319-56941-3_2.html
Zhang Z, Tian Y. A novel resource scheduling method of netted radars based on Markov decision process during target tracking in clutter. EURASIP J Adv Signal Process. 2016;2016:9. Available from: https://www.infona.pl/resource/bwmeta1.element.springer-doi-10_1186-S13634-016-0309-3
Conesa D, Martínez-Beneito MA, Amorós R, López-Quílez A. Bayesian hierarchical Poisson models with a hidden Markov structure for the detection of influenza epidemic outbreaks. Stat Methods Med Res. 2015 Apr;24(2):206-23. Available from: https://pubmed.ncbi.nlm.nih.gov/21873301/
Cheung WC, Simchi-Levi D, Zhu R. Reinforcement learning for non-stationary Markov decision processes: The blessing of (more) optimism. 2020. Available from: https://arxiv.org/abs/2006.14389
Killian T, Konidaris G, Doshi-Velez F. Transfer learning across patient variations with hidden parameter Markov decision processes. 2016. Available from: https://arxiv.org/pdf/1612.00475
Geist M, Scherrer B, Pietquin O. A theory of regularized Markov decision processes. 2019. Available from: https://arxiv.org/abs/1901.11275
Wei CY, Jafarnia-Jahromi M, Luo H, Sharma H, Jain R. Model-free reinforcement learning in infinite-horizon average-reward Markov decision processes. 2019. Available from: https://arxiv.org/abs/1910.07072
Wachi A, Sui Y. Safe reinforcement learning in constrained Markov decision processes. 2020. Available from: https://arxiv.org/abs/2008.06626
Lim SH, Xu H, Mannor S. Reinforcement learning in robust Markov decision processes. Math Oper Res. 2016;41(4):1325-53. Available from: https://pubsonline.informs.org/doi/abs/10.1287/moor.2016.0779
Le TP, Vien NA, Chung TC. A deep hierarchical reinforcement learning algorithm in partially observable Markov decision processes. IEEE Access. 2018;6:49089-102. Available from: https://ieeexplore.ieee.org/document/8421749
Modi A, Tewari A. Contextual Markov decision processes using generalized linear models. 2019. Available from: https://openreview.net/pdf?id=Bklh0SiQiN
Lee K, Choi S, Oh S. Sparse Markov decision processes with causal sparse Tsallis entropy regularization for reinforcement learning. 2017. Available from: https://arxiv.org/abs/1709.06293
Ding T, Zeng Z, Bai J, Qin B, Yang Y, Shahidehpour M. Optimal electric vehicle charging strategy with Markov decision process and reinforcement learning technique. IEEE Trans Ind Appl. 2020;56(5):5811-23. Available from: https://vbn.aau.dk/ws/portalfiles/portal/331224034/final.pdf
Wang Z, Qiu S, Wei X, Yang Z, Ye J. Upper confidence primal-dual reinforcement learning for CMDP with adversarial loss. In: Adv Neural Inf Process Syst. 2020;33. Available from: https://arxiv.org/abs/2003.00660
Wei Z, Xu J, Lan Y, Guo J, Cheng X. Reinforcement learning to rank with Markov decision process. In: Proceedings of the 40th International ACM SIGIR Conference on Research and Development in Information Retrieval; 2017:945-948. Available from: https://dl.acm.org/doi/10.1145/3077136.3080685
Selvi E, Buehrer RM, Martone A, Sherbondy K. On the use of Markov decision processes in cognitive radar: An application to target tracking. In: 2018 IEEE Radar Conference (RadarConf18). IEEE; 2018. Available from: https://ieeexplore.ieee.org/document/8378616
Ruan A, Shi A, Qin L, Xu S, Zhao Y. A reinforcement learning-based Markov-Decision Process (MDP) implementation for SRAM FPGAs. IEEE Trans Circuits Syst. 2020;67:2124-2128. Available from: https://ieeexplore.ieee.org/document/8850046
De Giacomo G, Calvanese D, Dalmonte T, De Masellis R, Orsi G. Digital twin composition in smart manufacturing via Markov decision processes. Comput Ind. 2023;149:103916. Available from: https://www.sciencedirect.com/science/article/pii/S0166361523000660
Rosenberg A, Mansour Y. Online convex optimization in adversarial Markov decision processes. 2019. Available from: https://arxiv.org/abs/1905.07773
Chen CT, Chen AP, Huang SH. Cloning strategies from trading records using agent-based reinforcement learning algorithm. In: 2018 IEEE International Conference on Agents (ICA); 2018 Jul; IEEE. p. 34-37. Available from: https://ieeexplore.ieee.org/document/8460078
Archibald TW, Possani E. Investment and operational decisions for start-up companies: a game theory and Markov decision process approach. Ann Oper Res. 2019:1-14.
Bai Y, Meng J, Meng F, Fang G. Stochastic analysis of a shale gas investment strategy for coping with production uncertainties. Energy Policy. 2020;144:111639. Available from: https://ideas.repec.org/a/eee/enepol/v144y2020ics0301421520303748.html
Nasir A, Khursheed A, Ali K, Mustafa F. A Markov Decision Process Model for Optimal Trade of Options Using Statistical Data. Comput Econ. 2020;58:327-346. Available from: https://link.springer.com/article/10.1007/s10614-020-10030-4
Hambly B, Xu R, Yang H. Recent advances in reinforcement learning in finance. Math Finance. 2023;33(3):437-503. Available from: https://onlinelibrary.wiley.com/doi/epdf/10.1111/mafi.12382
Huong TT, Thanh NH, Van NT, Dat NT, Van Long N, Marshall A. Water and energy-efficient irrigation based on Markov decision model for precision agriculture. In: 2018 IEEE Seventh International Conference on Communications and Electronics (ICCE); 2018 Jul; IEEE. p. 51-56. Available from: https://ieeexplore.ieee.org/document/8465723
Bu F, Wang X. A smart agriculture IoT system based on deep reinforcement learning. Future Gener Comput Syst. 2019;99:500-507. Available from: https://typeset.io/papers/a-smart-agriculture-iot-system-based-on-deep-reinforcement-226i9iipdo?citations_has_pdf=true
Toai TK, Huan VM. Implementing the Markov Decision Process for Efficient Water Utilization with Arduino Board in Agriculture. In: 2019 International Conference on System Science and Engineering (ICSSE); 2019 Jul; IEEE. p. 335-340. Available from: https://ieeexplore.ieee.org/document/8823432
Pan W, Wang J, Yang W. A cooperative scheduling based on deep reinforcement learning for multi-agricultural machines in emergencies. Agriculture. 2024;14(5):772. Available from: https://www.mdpi.com/2077-0472/14/5/772
Liu D, Khoukhi L, Hafid A. Data offloading in mobile cloud computing: A Markov decision process approach. In: 2017 IEEE International Conference on Communications (ICC); 2017 May; IEEE. p. 1-6. Available from: https://ieeexplore.ieee.org/document/7997070
Li M, Carter A, Goldstein J, Hawco T, Jensen J, Vanberkel P. Determining Ambulance Destinations When Facing Offload Delays Using a Markov Decision Process. Omega. 2021;101:102251. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0305048319308229
Parras J, Zazo S. Learning attack mechanisms in wireless sensor networks using Markov decision processes. Expert Syst Appl. 2019;122:376-387. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0957417419300235
Li X, Fang Z, Yin C. A machine tool matching method in cloud manufacturing using Markov Decision Process and cross-entropy. Robot Comput Integr Manuf. 2020;65:101968. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0736584519300924
Li Z. An adaptive overload threshold selection process using Markov decision processes of virtual machine in cloud data center. Clust Comput. 2019;22(2):3821-3833. Available from: https://link.springer.com/article/10.1007/s10586-018-2408-4
Yousefi S, Derakhshan F, Karimipour H, Aghdasi HS. An efficient route planning model for mobile agents on the Internet of Things using Markov decision process. Ad Hoc Netw. 2020;98:102053. Available from: https://www.sciencedirect.com/science/article/abs/pii/S1570870519309527
Njilla LL, Kamhoua CA, Kwiat KA, Hurley P, Pissinou N. Cyber security resource allocation: a Markov decision process approach. In: 2017 IEEE 18th International Symposium on High Assurance Systems Engineering (HASE); 2017 Jan; IEEE. p. 49-52. Available from: https://ieeexplore.ieee.org/abstract/document/7911870/
Chitsaz B, Cosenza B, Gupta V, Thain D, Mackay S. Scaling power management in cloud data centers: A multi-level continuous-time MDP approach. IEEE Trans Serv Comput. 2024;1-12. Available from: https://ieeexplore.ieee.org/abstract/document/10400800
Duan J, Lv C, Xing Y, Du H, Cheng B, Sangiovanni-Vincentelli AL. Hierarchical reinforcement learning for self-driving decision-making without reliance on labeled driving data. IET Intell Transp Syst. 2020;14(5):297-305. Available from: https://ietresearch.onlinelibrary.wiley.com/doi/full/10.1049/iet-its.2019.0317
Kamrani M, Rakha H, Ma Y. Applying Markov decision process to understand driving decisions using basic safety messages data. Transp Res Part C Emerg Technol. 2020;115:102642. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X20305490
Qi X, Jiang R, Li K, Wang W, Qi J. Deep reinforcement learning enabled self-learning control for energy-efficient driving. Transp Res Part C Emerg Technol. 2019;99:67-81. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X18318862
Ghosh S, Topcu U, Chong E, Etigowni S, Fainekos G, Kakade U. Model, data and reward repair: Trusted machine learning for Markov Decision Processes. In: 2018 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W); 2018; IEEE. Available from: https://ieeexplore.ieee.org/abstract/document/8416249
Song Y, Han S, Huh K. A self-driving decision making with reachable path analysis and interaction-aware speed profiling. IEEE Access. 2023;11:122302-122314. Available from: https://ieeexplore.ieee.org/abstract/document/10301421
de Almeida Costa M, de Azevedo Peixoto Braga JP, Ramos Andrade A. A data-driven maintenance policy for railway wheelsets based on survival analysis and Markov decision process. Qual Reliab Eng Int. 2021;37:176-198. Available from:
Ao Y, Zhang H, Wang C. Research of an integrated decision model for production scheduling and maintenance planning with economic objectives. Comput Ind Eng. 2019;137:106092. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0360835219305613
Gerum PCL, Altay A, Baykal-Gürsoy M. Data-driven predictive maintenance scheduling policies for railways. Transp Res Part C Emerg Technol. 2019;107:137-154. Available from: https://www.sciencedirect.com/science/article/abs/pii/S0968090X18314918
Arcieri G, Masegosa AD, Stella F, Vercellis C. POMDP inference and robust solution via deep reinforcement learning: An application to railway optimal maintenance. Mach Learn. 2024:1-29. Available from: https://link.springer.com/article/10.1007/s10994-024-06559-2



 スキャンしてリンクを取得
スキャンしてリンクを取得