要約
Semantic segmentation is the most significant deep learning technology.
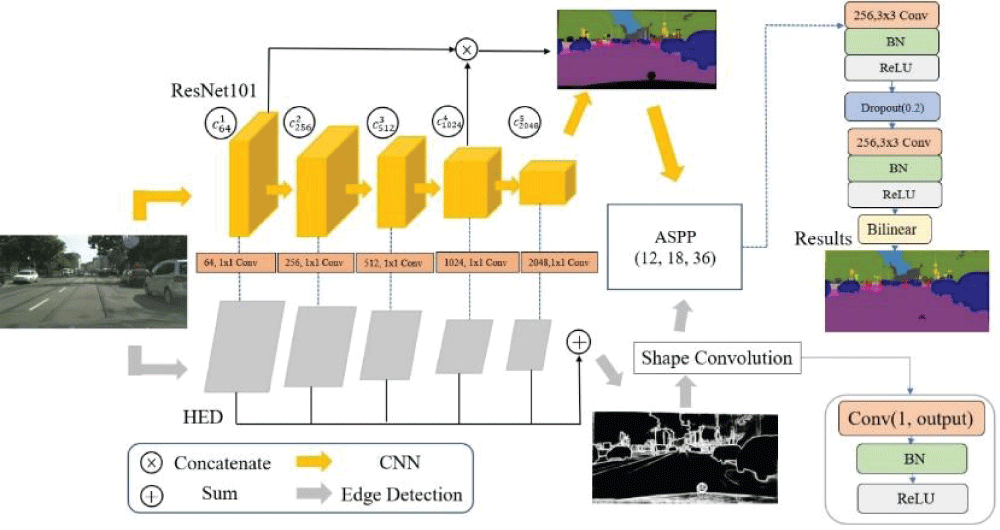
At present, automatic assisted driving (Autopilot) is widely used in real-time driving, but if there is a deviation in object detection in real vehicles, it can easily lead to misjudgment. Turning and even crashing can be quite dangerous. This paper seeks to propose a model for this problem to increase the accuracy of discrimination and improve security. It proposes a Convolutional Neural Network (CNN)+ Holistically-Nested Edge Detection (HED) combined with Spatial Pyramid Pooling (SPP). Traditionally, CNN is used to detect the shape of objects, and the edge may be ignored. Therefore, adding HED increases the robustness of the edge, and finally adds SPP to obtain modules of different sizes, and strengthen the detection of undetected objects. The research results are trained in the CityScapes street view data set. The accuracy of Class mIoU for small objects reaches 77.51%, and Category mIoU for large objects reaches 89.95%.